

Older ideas still shaping modern AI agents
Deliberative, reactive, and hybrid architectures explained through today’s agent systems
In the previous article, I wrote about some of the recurring patterns behind modern AI agents (ReAct loops, planner-executor systems, hierarchical agents, and the orchestration approaches) that now sit underneath a huge portion of the current agent ecosystem.
But while putting that piece together, I kept noticing something interesting. Many of these systems sound new on the surface, yet a lot of the underlying ideas have existed for much longer than the current wave of agent frameworks.
Once you start looking at older work around autonomous systems and classical AI architectures, you begin noticing familiar tensions everywhere. Systems that prioritize planning versus systems that prioritize responsiveness. Architectures built around reasoning versus architectures built around reaction. Trade-offs between control, adaptability, speed, and autonomy.
So it made sense to follow up the previous piece with this one.
I’m not saying modern LLM agents map perfectly onto these older paradigms. Understanding deliberative, reactive, and hybrid architectures, however, makes today’s agent ecosystem feel a little less chaotic and a lot more interpretable.
This article explores those architectural foundations and how many of those ideas continue to echo through the systems being built today.
For builders navigating the move from models to agents
If you strip things back, agentic systems are just different ways of organizing how an autonomous system perceives its environment, reasons about decisions, responds to changing conditions, and carries out actions toward a goal.
The interesting part is that there’s no single architectural approach for doing this well. Some systems prioritize planning and structured reasoning. Others are optimized for fast reactions and adaptability. And many modern systems attempt to balance both.
Broadly speaking, most agentic architectures tend to fall into three categories: deliberative, reactive, and hybrid architectures. Each one reflects a different philosophy around how intelligent systems should behave, make decisions, and interact with the world around them.
Let’s walk through them.
Deliberative architectures
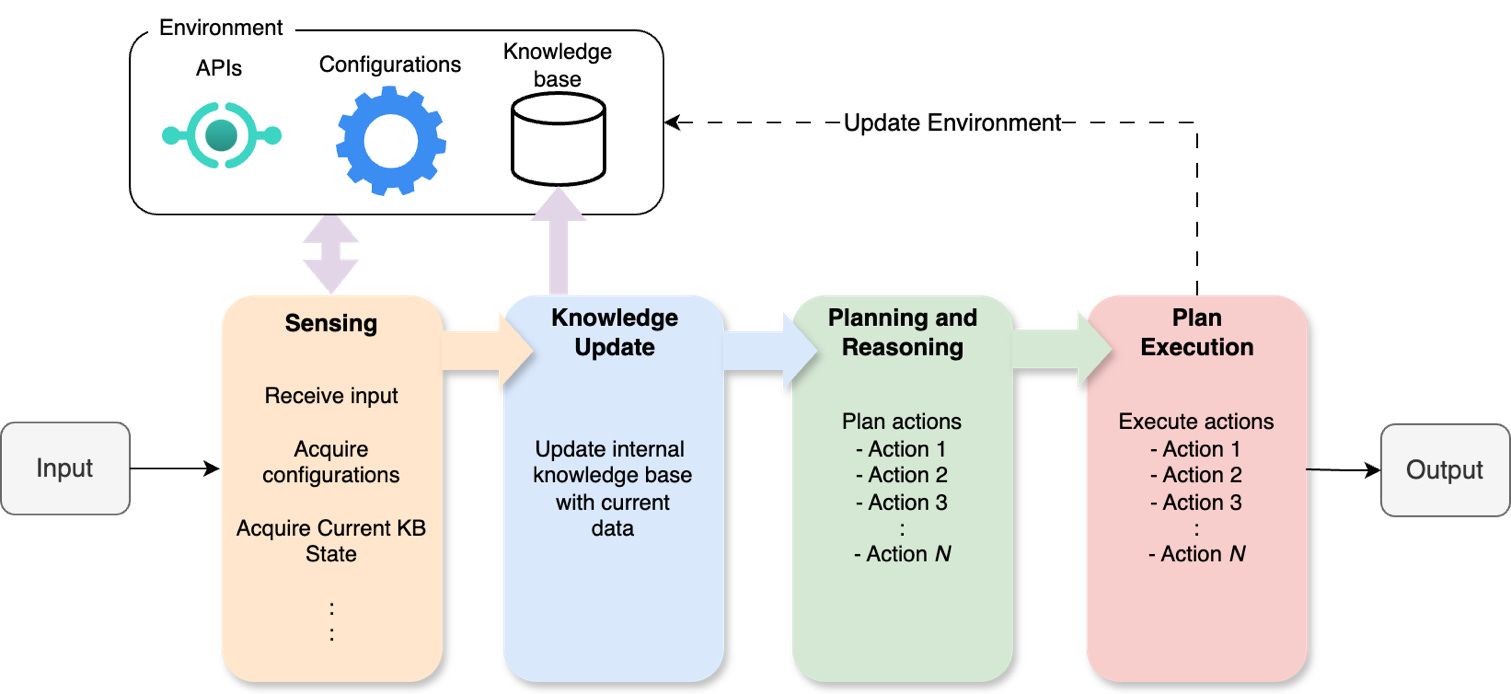
Also known as knowledge-based or symbolic architectures, deliberative architectures rely on the use of explicit representations of knowledge and reasoning mechanisms to reach decisions. They typically follow a sense-plan-act cycle, where they first perceive information about the environment, then make a plan of action according to that perception and the knowledge base, and finally execute such plans of action.
The key advantage of deliberative architectures is their ability to handle tasks that involve complex reasoning, such as planning, problem-solving, and decision-making. These architectures leverage techniques such as rule-based reasoning, constraint satisfaction, and heuristic search to navigate through intricate problem spaces and formulate appropriate courses of action.
One of the critical components of a deliberative architecture is the knowledge base that stores symbolic representations of the environment, goals, constraints, and domain-specific knowledge. This knowledge base is typically encoded using formal language or logic, enabling the system to perform logical inference and reasoning. The sense-plan-act cycle in deliberative architectures typically involves the following steps:
Sensing: The agent perceives and acquires information about the environment through various sensors or input mechanisms.
Knowledge updating: The perceived information is used to update the agent’s internal knowledge base, ensuring that it maintains an accurate representation of the current state of the environment.
Planning and reasoning: Based on the updated knowledge base, the agent employs reasoning techniques and algorithms to formulate plans and make decisions. This may involve techniques such as constraint satisfaction, logical inference, search algorithms, or heuristic-based planning.
Plan execution: Once a plan or course of action has been determined, the agent executes the corresponding actions in the environment, potentially modifying the environment or achieving specific goals.
Deliberative architectures excel in handling tasks that require complex reasoning, planning, and decision-making in well-defined environments. They can effectively handle uncertainty and ambiguity through techniques such as probabilistic reasoning, fuzzy logic, or belief revision mechanisms.
However, deliberative architectures also have some disadvantages. One significant challenge is the computational cost associated with maintaining and reasoning over complex knowledge bases, which can limit real-time responsiveness in dynamic environments. Additionally, the explicit representation of knowledge can be challenging in domains where knowledge is difficult to formalize or is constantly evolving.
To address these limitations, deliberative architectures are often combined with reactive or behavior-based components in hybrid architectures, allowing both complex reasoning and rapid response to environmental changes.
Despite their limitations, deliberative architectures remain a crucial component in many intelligent systems, particularly in domains where complex decision-making, planning, and reasoning are essential, such as robotics, decision support systems, and intelligent tutoring systems.
Reactive architectures
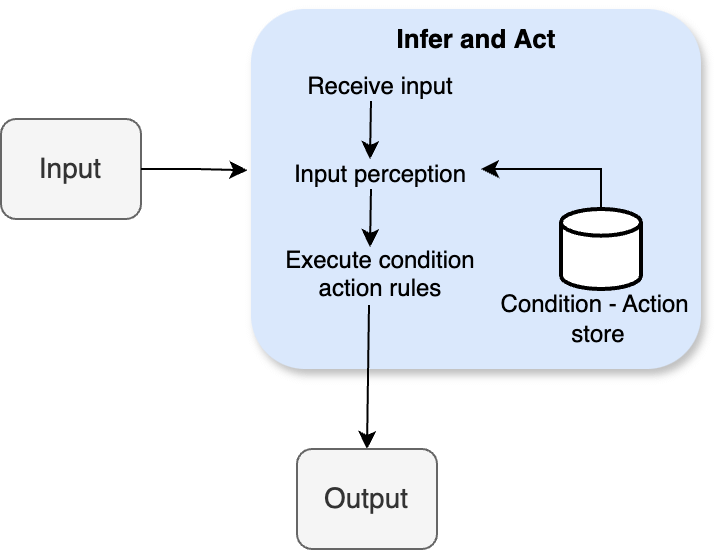
Reactive architectures, also known as behavior-based or stimulus-response architectures, aim to provide immediate responses to stimuli from the environment. Unlike deliberative architectures, reactive architectures do not rely on explicit models of the world or complex reasoning processes. Instead, these systems directly map perceptions onto actions, typically using simple condition-action rules or neural networks as depicted in the following figure:
Some of the key properties and characteristics of reactive architectures include the following:
Speed and responsiveness: Reactive architectures are designed to react rapidly to changes in the environment. By directly coupling perceptions to actions, they can bypass time-consuming deliberative reasoning processes, enabling swift and timely responses.
Robustness and fault tolerance: These architectures are generally robust and less susceptible to noise or incomplete information. Their simple, standalone nature makes them less prone to catastrophic failures, as individual components or behaviors can compensate for or mitigate the effects of faulty or missing input, especially when used within a deliberative architecture.
Handling uncertainty: Reactive architectures can effectively handle uncertainty in dynamic environments. Their ability to respond directly to environmental stimuli allows them to adapt and adjust their actions based on the current situation, without relying on precise or complete models of the entire world.
Parallel and distributed processing: Reactive architectures often employ parallel and distributed processing using multiple reactive modules, where multiple modules operate simultaneously and independently. This decentralized approach enables efficient handling of complex tasks and provides inherent scalability and modularity.
Emergence of complex behavior: Despite the simplicity of individual behaviors or rules, the interaction and coordination of multiple reactive components can lead to the emergence of complex, intelligent-like behavior at the system level.
While reactive architectures offer advantages in terms of speed, robustness, and handling uncertainty, they also have limitations as highlighted:
Lack of long-term planning: Reactive architectures cannot generally plan or reason about long-term consequences. Their focus is on immediate responses to environmental stimuli, making it difficult to pursue complex, multi-step goals or strategies.
Limited reasoning and abstraction: These architectures may struggle with tasks that require abstract reasoning, generalization, or the manipulation of symbolic representations. They are primarily designed to operate at a lower, stimulus-response level.
Limited learning capabilities: Many reactive architectures cannot learn from experience or adapt their behavior over time. Their fixed set of rules or behaviors may not be suitable for dynamic environments or tasks that require continuous learning and adaptation.
Despite these limitations, reactive architectures are widely used in applications where real-time responsiveness, robustness, and the ability to handle uncertainty are essential, such as in robotics, video games built with AI, and control systems. Additionally, reactive architectures often serve as components within more complex hybrid architectures, complementing deliberative or learning-based systems to achieve desired levels of performance and adaptability.
Hybrid architectures
Researchers have recognized the strengths and limitations of both deliberative and reactive architectures, leading to the development of hybrid architectures that aim to exploit the advantages of both approaches. Such hybrid architectures typically employ a layered structure, consisting of the following:
A reactive layer for fast and low-level responses. The reactive layer is responsible for handling real-time interactions with the environment, providing rapid and situationally appropriate responses to external stimuli. This layer is designed to be highly responsive, fault-tolerant, and capable of handling uncertainty, leveraging the strengths of reactive architectures.
A deliberative layer for high-level reasoning and planning. The deliberative layer is dedicated to higher-level reasoning, planning, and decision-making processes. This layer can maintain a more comprehensive representation of the environment, goals, and constraints, enabling it to formulate complex strategies, reason about abstract concepts, and plan long-term courses of action.
The interaction between these two layers is crucial for enabling agentic systems to respond effectively to dynamic environmental contexts while maintaining the capability to plan actions and reason about them. The reactive layer can provide real-time feedback and situational awareness to the deliberative layer, informing its decision-making processes. Conversely, the deliberative layer can guide and influence the reactive layer’s behavior by providing high-level plans, goals, and constraints.
To achieve complex goals and leverage the strengths of both layers, hybrid architectures often employ the following techniques:
Task decomposition: Break down complex tasks into subtasks that can be handled by the appropriate layer, with the reactive layer handling low-level, time-critical tasks and the deliberative layer focusing on higher-level planning and coordination
Multiplan selection: The deliberative layer can generate multiple potential plans or strategies, and the reactive layer can dynamically select and execute the most suitable plan based on the current environmental conditions
Planning with external modules: The deliberative layer can incorporate external modules or specialized algorithms for tasks such as path planning, resource allocation, or scheduling, leveraging domain-specific knowledge and techniques
Reflection and refinement: The deliberative layer can reflect on the outcomes of executed plans, learn from experience, and refine its reasoning and planning processes accordingly, enabling continuous improvement and adaptation
Memory-augmented planning: The deliberative layer can maintain a memory or history of past experiences, decisions, and outcomes, enabling it to leverage this knowledge in future planning and reasoning processes
By combining the strengths of both deliberative and reactive approaches, hybrid architectures seek to balance responsiveness and reasoning, enabling the development of more robust, autonomous, and adaptable agentic systems. These architectures leverage the power of both approaches, providing the ability to respond rapidly to dynamic environments while maintaining the capability for complex planning, reasoning, and decision-making.
The design and implementation of effective hybrid architectures remain an active area of research, as researchers strive to develop architectures that can seamlessly integrate and coordinate the deliberative and reactive components, enabling the creation of highly capable and intelligent agentic systems.
Selecting the appropriate architectural pattern for an agentic system is contingent upon the specific requirements of the application, encompassing factors such as task complexity, environmental uncertainty, and the necessity for real-time responsiveness. Deliberative architectures excel in scenarios that demand intricate reasoning and decision-making processes, while reactive architectures thrive in dynamic environments that necessitate swift and adaptive responses. Hybrid architectures strike a harmonious balance by judiciously leveraging the strengths of both paradigms, resulting in the development of more capable and adaptable agentic systems that can seamlessly navigate the complexities of their operating environments.
This article was adapted from Building Agentic AI Systems by Anjanava Biswas and Wrick Talukdar.
Reading through it, what stood out to me was how much of agent design ultimately comes back to timeless systems questions, like how decisions are made, how tasks are decomposed, how coordination happens, and how systems adapt under changing conditions.
That feels relevant right now as current conversations around agents still focus more on tooling abstractions than the systems underneath them. If you enjoy thinking about agents as systems-design problems rather than just autonomous demos, this book is worth exploring further.